Husarion ROSbot XL – arranque rápido
Husarion ROSbot XL es una plataforma universal de robots móviles autónomos ROS 2-nativos universal diseñada para investigación y desarrollo de prototipos rápidos y robot personalizado para casos de uso en interiores.
¿Buscas manual?
Versión de laOS
Para usar
los scripts de utilidad (por ejemplo.
~/flash_firmware.sh,
~/ros_driver_start.sh) asegúrese
de tener
al menos el versión del sistema .
Si tiene la versión anterior, por favor
actualice o utilice comandos de la pestaña
[de la manera de médico].
- Escript de utilidad
- Docker way
Yo tengo el *-2023-07-18(o más alta) versión del sistema operativo Husarion.
Unboxing
Lo que hay en la caja:
- ROSbot XL
- a Wi-Fi 2.4GHz / antena de 5GHz
- un cargador USB-C
- un cable Ethernet
- un gamepad
- un conjunto de ruedas regulares (neumáticas)
- dos teclas Allen: 2,5mm y 4mm
- una cámara para montar cámaras externas en el ROSbot.

Conectando la batería
la precaución
El robot se envía con la batería desconectada.
Es necesario
conectar la batería antes del primer uso:
- Utile una tecla Allen de 2,5 mm para desenroscar la cubierta de batería ubicada en la parte inferior del ROSbot XL.
- Una vez abierto, verá un conector blanco de 4 pines (enchufe) y un enchufe. Inserte el enchufe en el enchufe.
- Instale la cubierta de la batería de nuevo a su lugar.
El robot ya está listo para los próximos pasos.
Montar componentes externos
Si desea montar una cámara externa, LIDAR o cualquier otro equipo en su ROSbot, primero necesita ejecutar el cable a través de la cubierta del robot. El siguiente video demuestra cómo hacer eso.
Luego, acopla el equipo a la cubierta y conéctelo al conector apropiado dentro del robot.
Instalación de la Imagen del Sistema para ROSbot
ROSbot XL viene con 3 opciones de SBC, las instrucciones de configuración varían ligeramente entre ellas, así que por favor seleccione su versión a continuación.
- Intel NUC/Raspberry Pi
- Nvidia Jetson Nano
- Nvidia Jetson Orin Nano
información
ROSbot XL viene con una imagen de sistema operativo ROS Humilde preinstalada. Si acabas de recibir tu nuevo ROSbot XL, puedes saltarte este paso.
En algunas situaciones, es posible que tenga que restaurar el sistema ROSbot a sus ajustes predeterminados:
- Si el sistema se dañó accidentalmente,
- Actualizar el sistema operativo a la última versión con documentación soportada,
- Borrar todos los cambios de usuario y volver a la configuración de fábrica.
Para obtener instrucciones sobre cómo reinstalar el sistema operativo, consulte
la guía de reinstalación del sistema operativo.
Acceso a la terminal Linux de ROSbot
Para realizar la configuración inicial de la red, necesita acceder al terminal Linux de ROSbot. Hay dos opciones:
Opción 1: Usando pantalla, ratón y teclado
Para utilizar esta opción, necesitará un monitor externo, cables USB y HDMI, ratón y teclado.
- Intel NUC/Raspberry Pi
- Nvidia Jetson Nano
- Nvidia Jetson Orin Nano
ROSbot es básicamente una computadora que ejecuta Ubuntu, así que vamos a abrirlo como un PC estándar.
- Conecte una pantalla con HDMI, ratón y teclado en el puerto USB en el panel trasero de ROSbot.
- Enciense el robot y espere hasta que arranque.
- Abra el lanzador de aplicaciones (Husarion Logo en la esquina superior izquierda) – Herramitas de sistema y aplicación Terminator.
información
El entorno gráfico de escritorio de ROSbot requiere unos 2 minutos para comenzar durante la primera bota. Las botas posteriores requieren sólo aproximadamente 1 minuto después de la energía encendida.
Opción 2: El uso de un puerto Ethernet
- Enciense el robot y espere hasta que arranque.
- Conecte un extremo del cable Ethernet en su computadora y el otro en el puerto Ethernet del robot.
Si no tienes al menos el *-2023-07-18 versión del sistema operativo Humilde Husarion ROS . . . . . . . . . . .
- Para conectarse al ROSbot a través de SSH, escriba su terminal:
user.mylaptop:/home/user$
ssh husarion@192.168.77.2
- La contraseña predeterminada para el usuario
husariontambién husarion.
Conectando ROSbot XL a tu red Wi-Fi
Netplan
ROSbot XL utiliza
netplan en lugar de un gestor de Wi-Fi gráfico. Le permite tener todas las interfaces físicas de red configuradas desde un solo archivo de texto.
Para encontrar redes Wi-Fi disponibles, utilice el siguiente comando Linux:
husarion-rosbotxl:/home/husarion$$
sudo nmcli dev wifi rescan
nmcli dev wifi
Para conectar su ROSbot a una red Wi-Fi, edite
/etc/netplan/01-network-manager-all.yamlarchivo, por ejemplo, con
nano:
husarion-rosbotxl:/home/husarion$$
sudo nano /etc/netplan/01-network-manager-all.yaml
Y modificar las líneas 22-23 sustituyendo
"PLACE_YOUR_WIFI_SSID_HERE"con su SSID (nombre de red Wi-Fi) y
"PLACE_YOUR_WIFI_PASSWORD_HERE"con tu contraseña de Wi-Fi:
- Intel NUC/Raspberry Pi
- Nvidia Jetson Nano
- Jetson Orin Nano
Consulte el archivo de configuración de Netplan
A continuación
, guarde el archivo (con
ctrl-o si se utiliza nano) y aplique la nueva configuración de la red:
husarion-rosbotxl:/home/husarion$$
Puede comprobar a qué red Wi-Fi está conectado su ROSbot utilizando este comando:
husarion-rosbotxl:/home/husarion$$
Para encontrar su dirección IP (para el
wlan0Interfaz de red) tipo:
husarion-rosbotxl:/home/husarion$$
ip -4 addr show wlan0 | grep -oP '(?<=inet\s)\d+(\.\d+){3}'
Guarde esta dirección IP para el siguiente paso.
Acceso a distancia
OPTION 1: en una red LAN
Mientras que ROSbot está conectado a una red Wi-Fi, puede acceder a ella utilizando su dirección IPv4 por SSH:
user.mylaptop:/home/user$
OPTION 2: a través de Internet (VPN)
Si el acceso LAN no es suficiente puedes acceder al ROSbot a través de Internet usando
Husarnet. Puedes encontrar la guía completa sobre cómo hacerlo
aquí.
Lanzamiento del conductor de ROS
En esta etapa, su ROSbot debe estar en funcionamiento, con una conexión remota (LAN o VPN) desde su computadora portáctela.
Ahora vamos a iniciar el conductor de ROS que trae el paquete
rosbot-xl-ros y el Agente Micro-ROS (para interconfazarse con el firmware que se ejecuta en el Microcontrolador STM32).
Azotando el firmware
Acceda a la terminal de su ROSbot y ejecute:
- Escript de utilidad
- Docker way
husarion-rosbotxl:/home/husarion$$
Empezar el conductor
Para lanzar nodos básicos ROSbot XL ROS ROS 2, pegar el siguiente comando en el terminal del ROSbot:
- Escript de utilidad
- Docker way
husarion-rosbotxl:/home/husarion$$
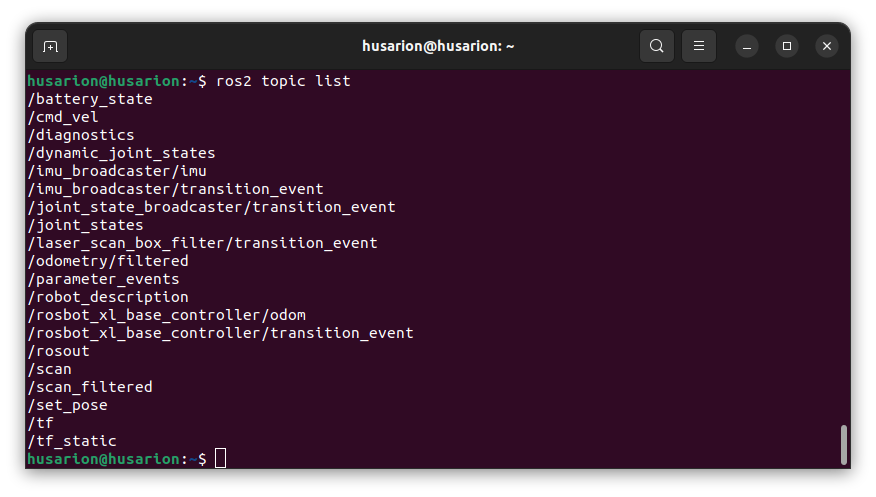
En este punto, los nodos ROS de los contenedores están disponibles a nivel del sistema operativo de host.
Comete ROS disponibles Temas de ROS:
husarion-rosbotxl:/home/husarion$$
información
Si no tienes ROS 2 Humble instalados de forma nativa en tu sistema operativo (por ejemplo, si estás usando Nvidia Jetson Nano), accede a la
rosbot-xlcontenedor:
husarion-rosbotxl:/home/husarion$$
docker exec -it rosbot-xl bash
Ahora puede ejecutar el siguiente comando para comprobar los temas:
root.a837c86387c2:/ros2ws.
Conducción manual ROSbot con teleop_twist_keyboard
- Intel NUC/Raspberry Pi
- Nvidia Jetson Nano
- Nvidia Jetson Orin Nano
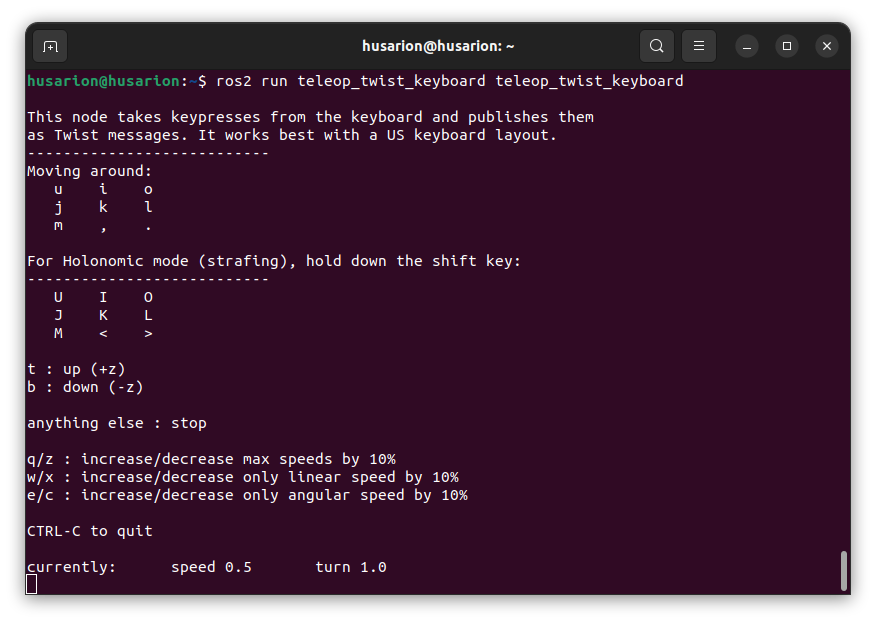
Lanzamiento de un
teleop_twist_keyboardNodo ROS para el control manual ROSbot:
husarion-rosbotxl:/home/husarion$$
ros2 run teleop_twist_keyboard teleop_twist_keyboard
Después de ejecutar el comando, verá la instrucción de uso:
Proyectos de referencia
Ahora ya sabes cómo ejecutar los nodos ROS ROS ROS.
Correr ROS de forma nativa está bien para proyectos relativamente pequeños. Para otros más complejos, una configuración completa estúpeda es un mejor enfoque.
Advertencia
Si estás planeando probar las próximas demostraciones, asegúrese de detener la configuración básica primero ejecutando el siguiente comando:
- Escript de utilidad
- Docker way
husarion-rosbotxl:/home/husarion$$
- Intel NUC
- Raspberry Pi
- Nvidia Jetson Nano
- Nvidia Jetson Orin Nano
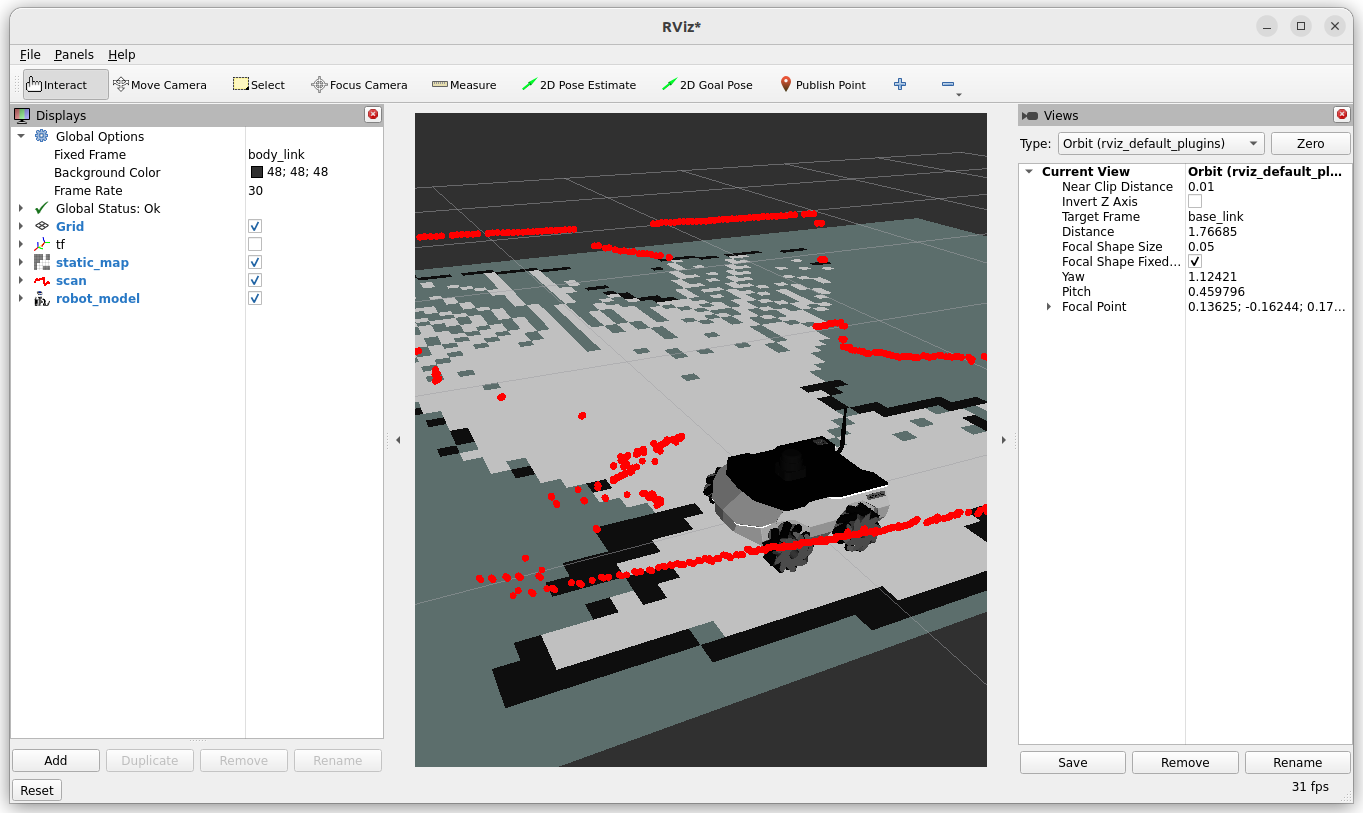
Aquí hay un ejemplo de un mapa generado con el proyecto
rosbot-xl-mapping, que se puede utilizar en la navegación
rosbot-xl.
Tutoriales de ROS 2
ROS 2 (Robot Operating System 2) proporciona bibliotecas y herramientas para ayudar a los desarrolladores de software a crear aplicaciones robóticas. Hemos reunido una serie de
Tutoriales ROS 2 dedicados a esta plataforma que sirven como una introducción práctica a ROS 2. Puedes ejecutarlos en cualquiera de nuestros ROSbots, ya sea en un robot físico o en el entorno de simulación. Estas guías paso a paso se adaptan para acomodar tanto a los principiantes que se embarcan en su viaje ROS 2 y usuarios experimentados que buscan profundizar su comprensión de la navegación por robot.